Hopping Robots
This Project is no longer active.
NREC is researching and developing all-terrain hopping robots for space, search and rescue, and defense applications.
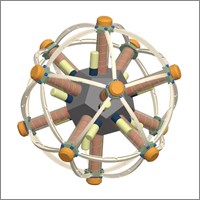
The symmetric, multi-legged Robotic All-Terrain Surveyor (RATS) combines hopping and rolling to move around in rugged environments.
Potential RATS missions include deploying sensors, operating as mobile communications relays, carrying out search and rescue operations, and performing long-range planetary survey missions in low gravity environments.
past contact
- Thomas Gordon