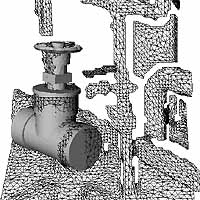
Artisan is a software package for semi-automatic Task Space Scene Analysis (TSSA) developed to facilitate telerobotic Decontamination and Dismantlement (D&D), particularly selective equipment removal. The principal objective of TSSA is construct a 3-D model of the work zone around a robot so that automatic control techniques, such as trajectory planning, collision avoidance and scripted motion sequences, can be used to speed task execution relative to conventional teleoperation.
Displaying 7 Publications
current head
current staff

past head
- James Osborn
past staff
- Herain Oberoi
- Scott Thayer
past contact
- James Osborn