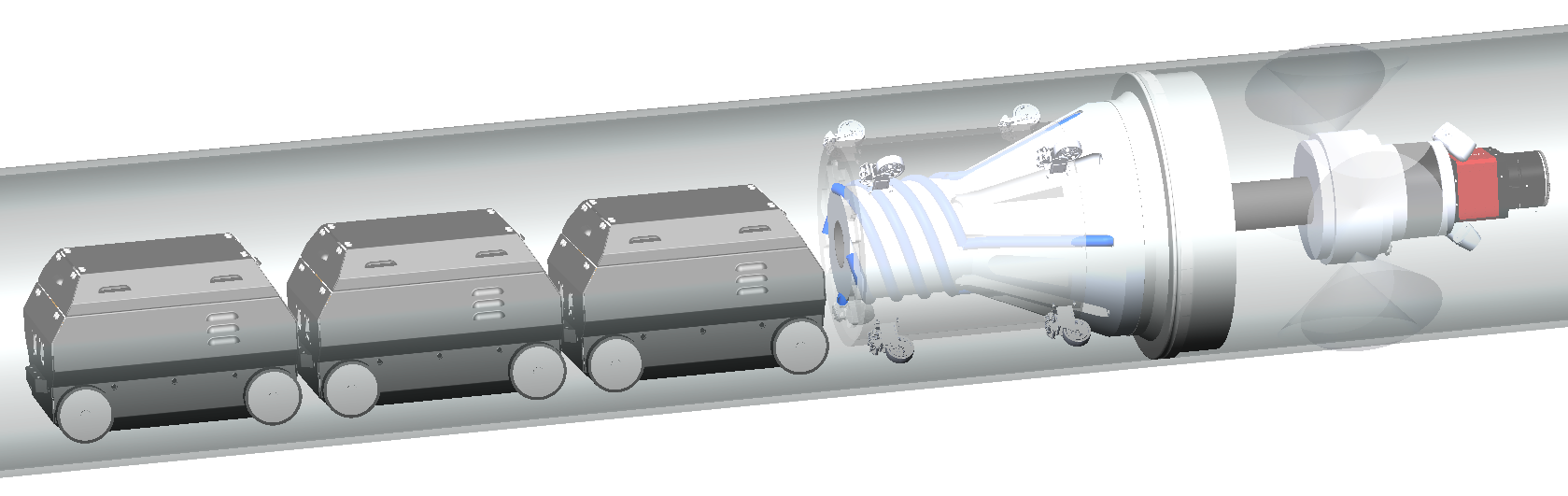
Old natural gas pipelines are underground for decades without being taken a look and many issues may occur. Upon events like leakages, pipes were dug up and can be very slow and costly. Our solution involves the robotic construction of a novel structurally independent self-healing and self-reporting pipe within the old pipe with minimal to no disruption of gas services. An innovative modular robotic platform is being designed to perform three functions: inspection of the old pipe, construction of the new pipe, and inspection of the newly constructed pipe. The new pipe material will be a tough and durable polymeric material. Incorporated self-healing and self-reporting functionalities coupled with the inspection components of the robotic platform can eliminate manual efforts to detect and repair damage in the new pipe material by providing real-time data and visualization. This approach, encompassing state-of-the-art robotic and smart material technology will enable a new pipe rehabilitation solution that will lower rehabilitation and maintenance costs for over 60,000 miles of legacy pipes.