The DARPA Subterranean or “SubT” Challenge seeks novel approaches to rapidly map, navigate, and search underground environments during time-sensitive combat operations or disaster response scenarios.
Our mission is to seamlessly provide any decision maker with the information necessary to make coordinated, time-critical decisions in uncertain underground environments. Some of our applications include: Rapid gain of situational awareness, Search and rescue, Remote scouting and. Forensics/data analysis
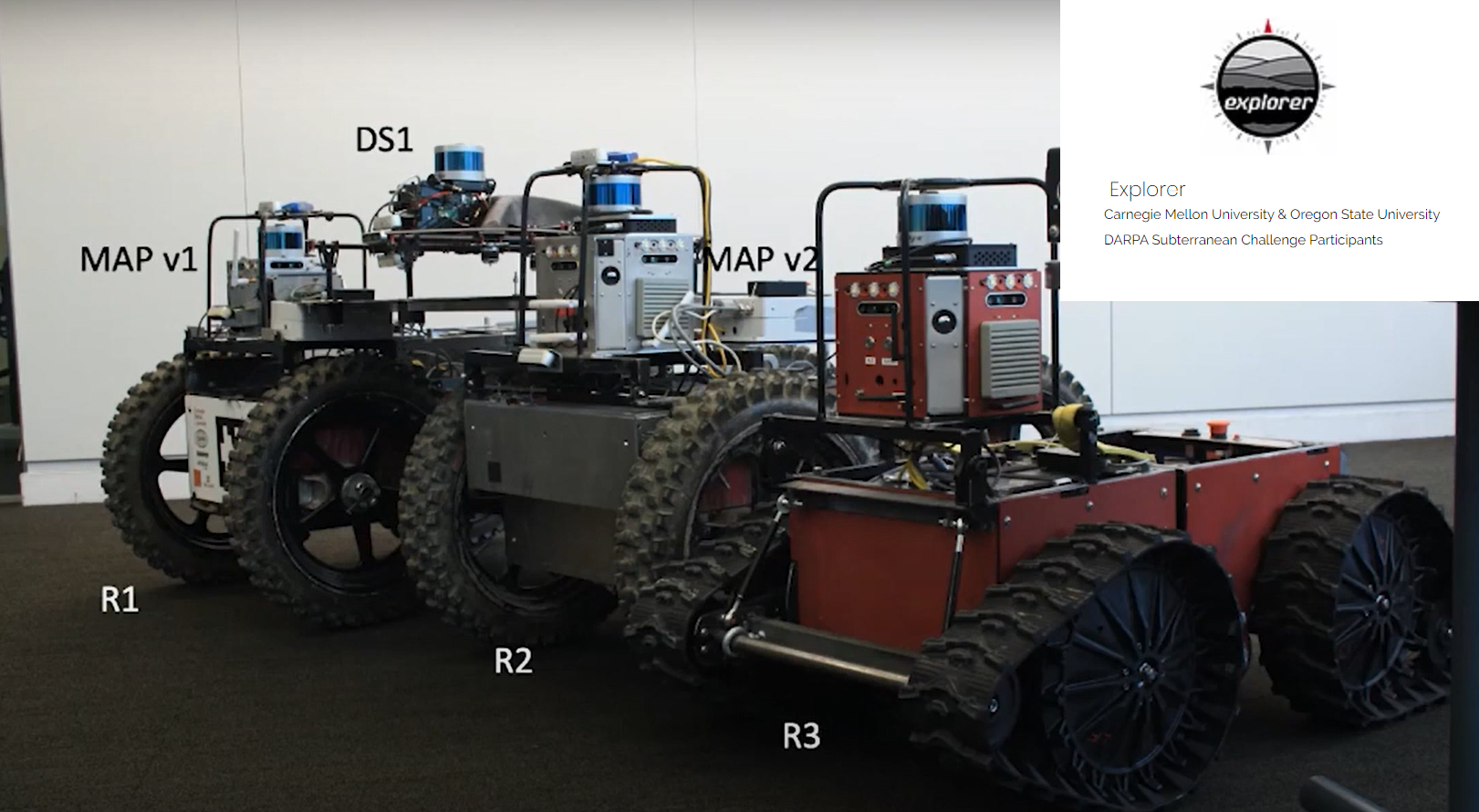
Core Technologies include: Reconfigurable multi-modal platforms, Rapid reconfiguration to assemble heterogeneous agents, Robust, coordinated and efficient exploration, Redundancy in algorithms and communication options, Multi-Modal sensing and SLAM, LiDAR, 3D & imaging cameras, dropped ranging-radio anchors, Semantic mapping, Detecting objects of interest, Robust communication, Mesh network, communications & planning