Enhanced Real Time Motion Planning
Project Head: Christopher Urmson
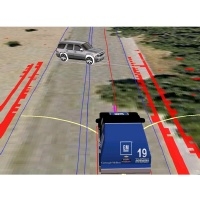
Motion planning is fundamental to autonomous driving. In this project we are exploring new variable resolution data representations and the use of multi-core processing to improve motion planning for autonomous on-road driving.
