
We develop a feature-based tracking method to recover the full-motion (3 rotations and 3 translations) of the head using a cylindrical model. We introduce the SIFT features as a universal matching technique in tracking process. Tracking by detection approach can overcome a divergence problem, which frequently occurs in previous work (Region-based optical flow approach). Our system automatically generates view-based head model. It contains regions of the facial features, such as eyebrows, eyes, nose, mouth and also ears when they are visible. A set of SIFT features is stored and updated for each reference pose while tracking sequences. These templates are employed to rectify error accumulation and to avoid divergence in tracking. The robustness of the proposed system is experimentally shown in video sequences with occlusion and fast motion.
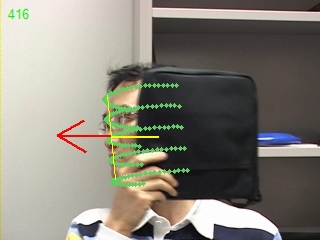 |
AVI Movie (xvid codec) |
