
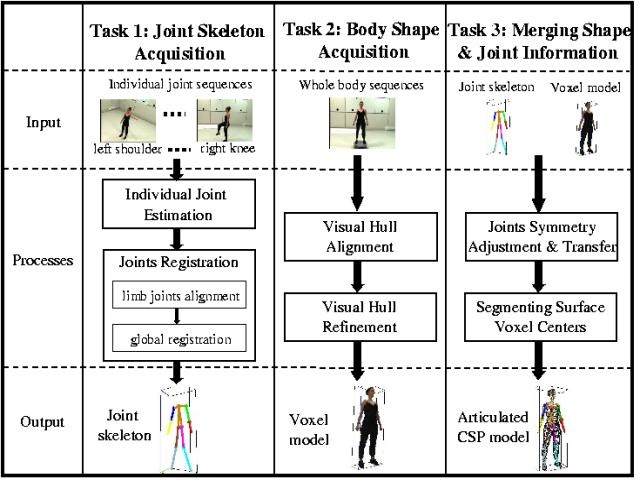
We have constructed a system for building 3D kinematic models (shape, body part segmentation, and joint information) of humans. This system is based on our temporal shape-from-silhouette algorithms. An overview of the system is as follows:
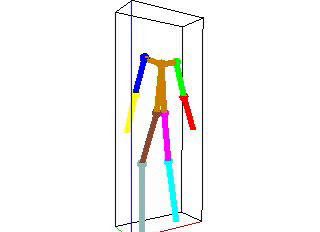
An example of the results of applying the system is the three kinematic models illustrated in the following movie.
 |
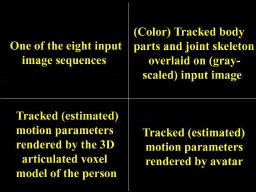
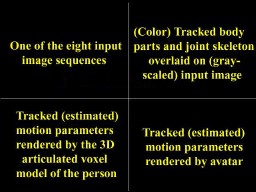
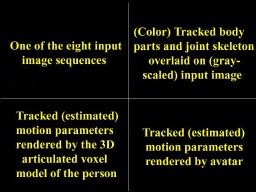
These kinematic models can then be used to track new motions of the person using a tracking algorithm closely related to our temporal shape-from-silhouette
algorithms. Examples of tracking the person in this way are shown below.
 |
 |
 |
Displaying 6 Publications
2016
Master's Thesis, Tech. Report, CMU-RI-TR-16-22, Robotics Institute, Carnegie Mellon University, May, 2016
2005
Journal Article, International Journal of Computer Vision, Vol. 63, No. 3, pp. 225 - 245, August, 2005
Journal Article, International Journal of Computer Vision, Vol. 62, No. 3, pp. 221 - 247, May, 2005
2004
Conference Paper, Proceedings of 2nd International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT '04), pp. 373 - 378, September, 2004
Conference Paper, Proceedings of SIGGRAPH '04 Conference on Sketches & Applications: Session: Motion, pp. 31, August, 2004
2003
Conference Paper, Proceedings of (CVPR) Computer Vision and Pattern Recognition, pp. 77 - 84, June, 2003
current head

current staff

current contact
past head
- Simon Baker