We are developing a perception system to fit onto a pipe crawler. Our system will build 3D appearance models of the inside pipe surface and register changes in appearance and structure over time in order to support automated corrosion detection. Sponsored by QNRF.
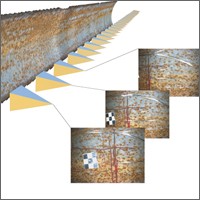
The LNG Pipe Vision (LPV) system travels through the inside of pipe networks and builds a detailed, three-dimensional map of the entire interior surface of the pipes. Inspectors can then use this map to find areas with corrosion problems. This technology lays the foundation for (semi-) automated corrosion detection.
Displaying 4 Publications
