
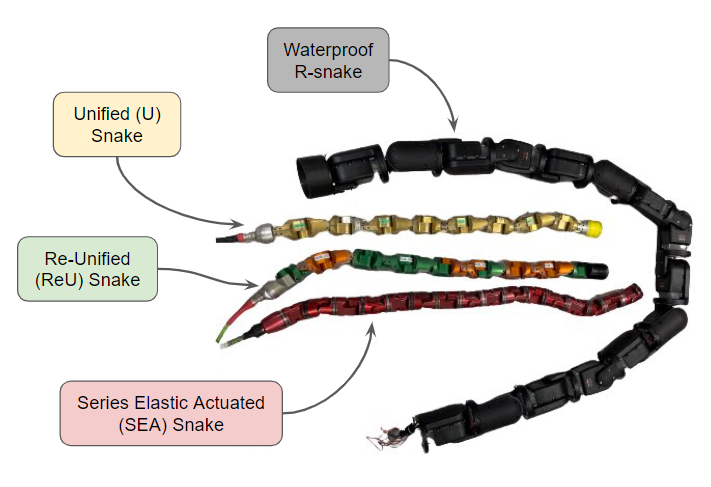
Taking from the first generation of the snake robot, our snake robots have evolved into the snake robot system from both hardware and control strategy. For hardware, we have our unified snake which is analogue, moving on to Re-Unified snake with Ethernet communication. We have our series elastic actuated snake that responds to obstacles and adds another layer of safety to operators, and our R-snake using waterproof actuators and can go underwater.
We are developing a control and estimation library based on the Robot Operating System (ROS) that brings together our group’s decades of research on snake robots under a unified software architecture. This library implements gaits, state estimation algorithms, compliant motion controllers, and user-friendly interfaces to control the snake robots and provide sensor feedback (robot state and camera feeds) for deploying our robots into the field. Our modular hardware using Ethernet-based communication protocols furthermore enables deploying this library on different snake robot designs and rapidly testing and evaluating new controllers we are developing across different hardware platforms.
