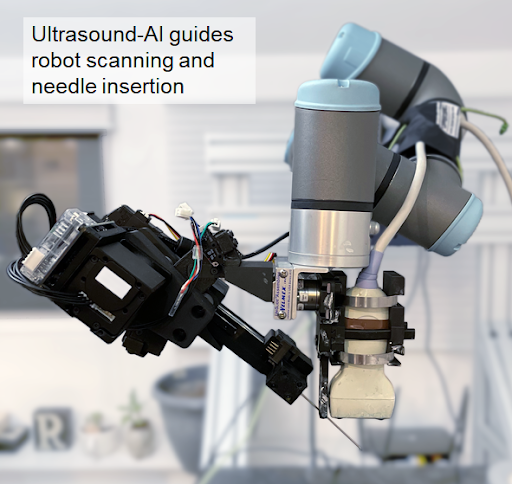
The most important component in case of high-tempo, traumatic scenarios on the battlefield is inserting a needle in the vessel of the patient autonomously, as there is no professional medical person present. There are challenges on both mechanisms and algorithms. On the mechanisms side, One major challenge is how to get the amount of Degree of Freedom we need in a small footprint and make it portable. To counter this problem, we designed a mechanism that has a degree of freedom to adjust the position of the needle. We shrunk the mechanisms down and made the entire design using very light material so that it can be portable.
On the algorithms side, one challenge in this problem is how to model the needle dynamics and kinematics as it shifts through different scenarios: outside the skin, in contact with the skin surface and inside the skin surface. The needle will behave differently in different scenarios. Furthermore, other challenges are the constant movement of the skin surface of insertion due to heavy breathing of the patient, needle passing through the vessel due to excess force applied, needle slipping off the vessel due to which the vessel can form a haematoma. Moreover, the exact location of the needle tip is also not accurate. To counter these problems, we are designing a control law which takes force measurement at the needle tip as feedback and will be modelling the needle dynamics based on different scenarios. Furthermore, we’ll also model the approximate behavior of the needle when it contacts a vessel and how we can exploit the geometry of the vessel to ensure guarantee in needle insertion.



