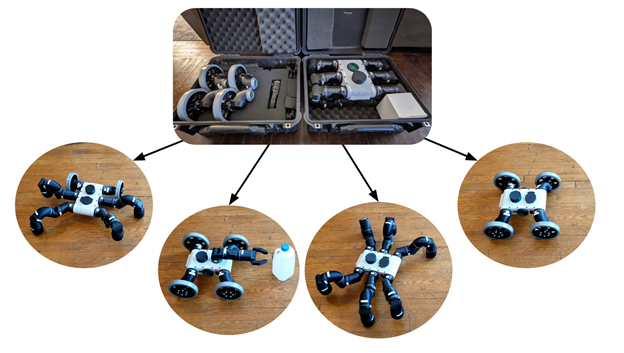
The Biorobotics group has embraced and advanced modular robot systems, first starting with our snake robots and now virtually all of our hardware and software systems. The obvious immediate benefit for modular robotic systems is that a core set of modules can be combined and recombined to form a customized robot, perhaps on a daily basis. They also allow for better serviceability of the robots because if a modular should fail, it simply needs to be replaced. We have discovered, in our work, that modularity also allows for rapid design of near-final systems, sometimes creating a tight design loop between the designer and the user.
Our group’s work toward modularity has taken a comprehensive view, ranging from low-level hardware and software support, to mid-level parameter estimation and control, and all the way to high-level artificial intelligence. Regardless of level or aspect of modularity development, scalability pervades all aspects of our research. Scalability can take on several forms; for example, the number of possible robot designs grows exponentially with the number of core modules (really modular types) in a given set of modules. The number of system level controllers, and the number of behaviors that depend on such controllers also grows exponentially, but even faster than the number of robot designs.



