Needle Steering for Brain Surgery
Project Head: Cameron Riviere
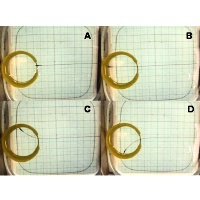
We have developed a means to accomplish proportional steering control of a flexible needle by controlling the orientation of the needle and spinning it with a variable duty cycle. This approach makes it possible to reach deep lesions with high accuracy using an extremely narrow probe. Both of these characteristics offer important advantages for neurosurgery. To date we have demonstrated the technique in vitro in artificial media (as in the photograph below).

Displaying 6 Publications
2010
Journal Article, Neurosurgery, Vol. 67, No. 4, pp. 1117 - 1123, September, 2010
Conference Paper, Proceedings of 32nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC '10), pp. 5432 - 5435, September, 2010
2009
Conference Paper, Proceedings of 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC '09), pp. 258 - 261, September, 2009
2007
Conference Paper, Proceedings of 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC '07), pp. 2756 - 2759, August, 2007
2006
Conference Paper, Proceedings of 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC '06), pp. 559 - 562, August, 2006
Conference Paper, Proceedings of 32nd Annual Northeast Biomedical Engineering Conference (NEBEC '06), pp. 103 - 104, April, 2006
current head

current staff


current contact
past staff
- Johnathan A Engh
- Craig Lehocky
- Davneet Minhas
- Yi-Tsen Pan
- Gregg Podnar