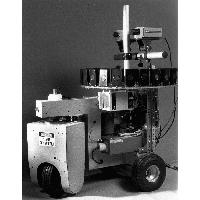
Neptune is a three wheeled robot trike. The front wheel both drives and steers and the two rear wheels are passive. It’s a very simple motion control system and even simpler power system. This means it works, and works well, and worked for over six years through different projects.
The steering and drive motors are synchronous AC motors controlled through relays. An onboard 68K board provided timing signals and turned relays on and off for motors and accessories.
Neptune’s sensors included stereo vision and a ring of ultrasonic time-of-flight sensors.
Displaying 1 Publications
1995
Magazine Article, IEEE Robotics & Automation Magazine, Vol. 2, No. 2, pp. 9 - 15, June, 1995
