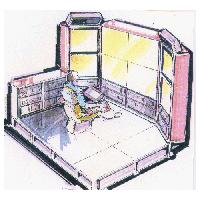
The human operation and telerobotic and supervisory control of sophisticated and remote decontamination and decommissioning (D&D) robotic systems is a complex, tiring and non-intuitive activity. Since D&D and selective equipment removal (SER) are going to be a major future activity in DOE’s ER&WM cleanup agenda, it seems appropriate to utilize an operator control station and interface which maximizes operator comfort and productivity. Carnegie Mellon University (CMU) proposes to develop a state-of-the-art robot operator control station with standard hardware and software control interfaces to be used on a variety of D&D robotic systems currently under development by the OTD. The purpose of this system is to provide a reconfigurable operator interface platform, applicable across D&D robot systems, allowing for cost-effective testing and deployment of various robot systems for demonstration and field-use purposes.The benefit is to be seen in the ability to control different robot systems through simple interchange of interface modules mounted to the operator’s chair, and the porting/development of interface display software to a common computing and programming platform. Cost savings can be realized through this system, since it represents a powerful and re-configurable test platform for evaluating the various robot systems currently available or under development for the OTD D&D, Tanks and Mixed Waste focus groupsprograms. The proposed system consists of a large multi-screen projection-TV system framed on both sides by several high-resolution TV monitors, stereo speakers, a reconfigurable operator console and control chair module with various removable interface modules (such as joysticks, buttons, touch-screen, etc.), all ergonomically mounted on a raised platform and integrated with the display and control electronics. The embedded computing consists of computing racks to operate the consoles and to house the robot-control and interface computing. The console computing consists of a dedicated processor system operating communicating with other hardware and interfaces via NDDS over ethernet, serial or parallel interface.
current staff

past head
- Hagen Schempf
past staff
- Anthony Nolla
past contact
- Hagen Schempf