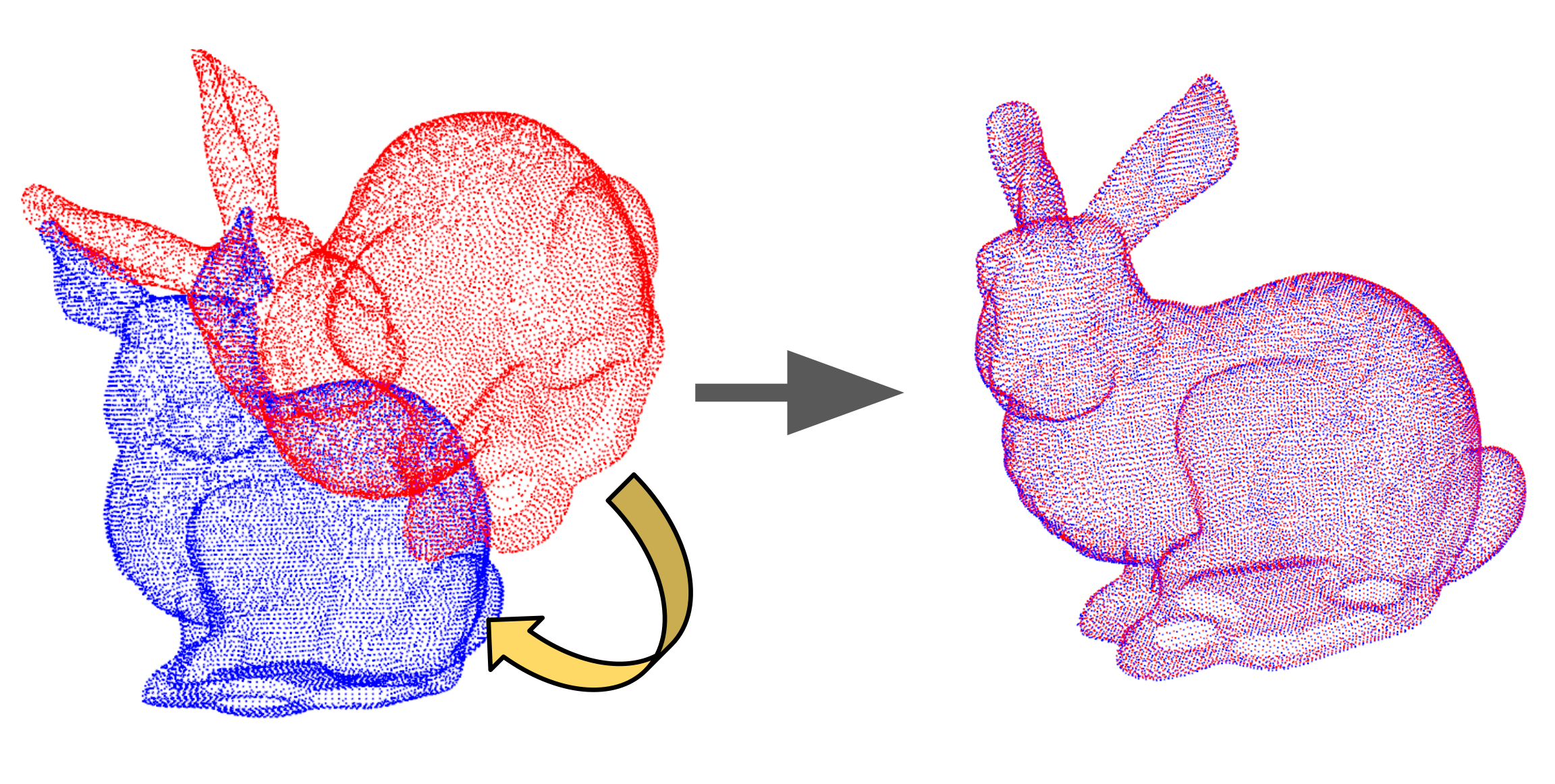
Point Cloud registration is an important step for various applications such as robotic manipulation, Augmented Reality, etc. Recently developed deep learning-based methods have shown a significant improvement in speed over conventional methods for registration. Our lab works in two different aspects of deep learning-based PCR.
One, we want to develop better loss functions for PCR. Often the choice of loss functions for deep learning-based registration methods is not trivial. We have developed an insight that PCR can be treated as a classification problem. This insight allows us to import well-studied loss functions from classification to registration and gives additional benefits such as the ability to register partial point clouds and filter outliers.
Second, we want to develop computationally efficient network architectures for point cloud registration. We have developed two such networks, PCRNet for registration and MaskNet for outlier filtering. Currently, both PCRNet and MaskNet use PointNet as the backbone and in the future, we want to extend this work in order to achieve higher accuracy.
current head



past past
- Animesh Dhagat
- Vinit Sarode
- Arun Srivatsan