Probabilistic planner technology can significantly extend the capabilities of current sensors. In many situations time may not permit covering a target environment completely. However, if the planner has access to a probabilistic map of mine locations, it can guide opportunistically the robot. For example, the planner might direct the robot to sweep first the region most likely to contain mines. After reaching a time limit without encountering a mine, the planner could then postulate that the cell is mine-free and direct the robot to another cell. Using a priori information can also solve the dual problem — lane clearing. So, instead of finding regions of high mine concentrations, this method could find sparsely mined regions that allow safe passage.
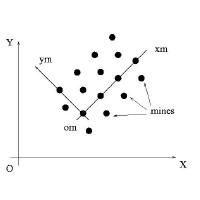
Our initial work focuses on a particular minefield pattern, selected from Field Manual 20-32 of the Department of the Army. This is a row minefield in which every other row is offset slightly by nu from the rows above and below it. We pose the problem of estimating the scale of the minefield (both c_1, the space between mines in each row, and c_2, the space between rows) during the mine search and choosing the path adaptively, based on the estimated scale. However estimating c_1, c_2, and nu are not by themselves enough. We also must determine the orientation and the origin of the minefield as well.
We develop an algorithm that decodes a minefield, i.e., determines the parameters c_1, c_2, nu, the orientation and the origin of the minefield. The search algorithm estimates the probable locations of remaining mines in order to determine where the search should proceed. This work also answers a simple question: given a path that the robot has traversed, what are the probabilities of all the possible mine arrangements that may exist in the minefield?
We assume that mines cannot be closer together than some fixed value, and that there should be at least two mines in each direction. As soon as the robot begins to gather sensor information, and at any point during the search, this knowledge about c_1 and c_2 can be refined. We update the distributions of c_1 and c_2 when 1) the robot detects a mine, 2) it reaches a location in which it expects (but fails) to find a mine, and 3) the search is complete. Finally, our approach handles either missing mines or false negatives, the mine was present but the detector missed it.
