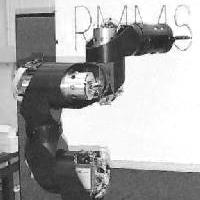
Reconfigurable Modular Manipulator System
Robots are more flexible than task-specific hardware for automation. In theory, one can change a robot’s task simply by loading a new program into the robot’s controller. However, in practice, each robot has a configuration and sensing capabilities that support only the applications for which the system was designed.
The CMU Reconfigurable Modular Manipulator System (RMMS) addresses the problems associated with conventional fixed-configuration manipulators. The RMMS utilizes a stock of interchangeable joint (actuator) and link modules of different size and performance specifications. It extends the concept of modularity to include the control algorithms and task planning software.
Displaying 2 Publications
1996
Conference Paper, Proceedings of (ICRA) International Conference on Robotics and Automation, Vol. 2, pp. 1434 - 1439, April, 1996
1995
Workshop Paper, Workshop on Some Critical Issues in Robotics, October, 1995
past head
- Pradeep Khosla
past staff
- Chris Paredis