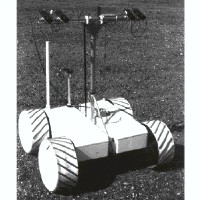
Ratler, or Robotic All Terrain Lunar Exploration Rover, is about the size of a tractor mower, with four depth-sensing (or stereo) cameras mounted on a 1.5 meter mast. It is a battery-powered, four-wheeled, skid-steered vehicle, about 1.2 meters long and wide, with fifty centimeter diameter wheels. Unlike any other robot, Ratler’s body is divided into halves that rotate against each other. This articulation enables all four wheels to maintain ground contact, even when crossing uneven terrain, which increases Ratler’s ability to surmount terrain obstacles.




current contact
past head
- Eric Krotkov
past staff
- John Bares