NREC collaborated with RAND Corporation to incorporate NREC’s field-proven robotic mobility and planning software into RAND’s suite of high-resolution, force-on-force simulators.
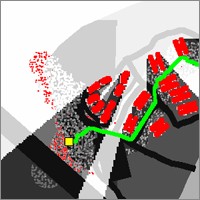
To better analyze scenarios involving robotic systems, NREC and RAND added robotic planning, mobility and control algorithms to high-resolution simulation models. NREC’s Field D* dynamic planning library has been incorporated into RAND’s Janus and Joint Conflict and Analysis Tactical Simulation (JCATS) force-on-force simulation environments. NREC’s fractal terrain generation algorithms (which generate very high-resolution terrain for robotic mobility simulations) and intervisibility algorithms (which determine whether targets are visible to assets and assets are visible to threats) have also been added to the Janus and JCATS simulators.
past contact
- Thomas Gordon