Sidewinding is an efficient gait employed by some snakes when crossing relatively open terrain. It is most commonly exhibited by snakes on loose or slippery surfaces, such as sand and mud, that cannot provide the lateral resistance required for slithering. For similar reasons, sidewinding is a favored gait for snake robots that eschew passive wheels (such as our Modsnakes). Avoiding such wheels increases the robustness of the system while reducing its size, but also increases the ratio of longitudinal to lateral friction, impeding slithering performance. Sidewinding does not rely on this friction ratio, and so retains its efficiency when applied to such systems.
The basic principles of sidewinding have been understood in the biology community since the late 1920s, based on experimental observations by Mosauer. In the robotics community, Burdick, Radford, and Chirikjian added a rigorous mathematical foundation to the study of sidewinding, providing the standard sidewinding model shown below, along with a modal formulation for shapes that satisfy its constraints.
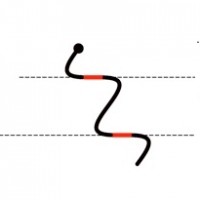
In this sidewinding model, the ground contact segments are in static contact with the ground. At their leading edges, the snake is continually lowering itself to the ground, while simultaneously peeling itself up at the trailing edge. The raised portions of the snake’s body are arch segments. As the snake sidewinds, the ground contact segments leave ground contact tracks against the terrain; each of these segments is one body-length long and the net direction of travel is given by the offset between these tracks.
The standard sidewinding model is comprehensive, but the complex three-dimensional motion it describes requires many parameters. To simplify analysis of this gait, I developed the virtual tread model for sidewinding. In this model, the snake’s backbone is considered as a helix wrapped around a virtual core, such as an elliptical cylinder. Revolving the backbone curve around the core (in the manner of a tracked vehicle’s treads) propels the core laterally. It also induces changes in the backbone shape that are consistent with the full sidewinding model, with the rolling contact of the tread equivalent to the laying down and peeling motions in the standard model. This tread model is related to Mosauer’s observations that sidewinding is like a “rolling spring,” but the tread model allows for non-circular core shapes and is thus a useful analytical tool as well as an intuitive analogy.
The virtual tread sidewinding model can be further reduced by projecting it along its axis. We have used this projection to analyze the stability of sidewinding snake robots moving along sloped surfaces, with good agreement between the predicted and measured maximum slopes on which the sidewinder could balance for different aspect ratios.
