Simultaneous Localization and Mapping with Detection, Tracking, and Classification of Moving Objects
Project Head:
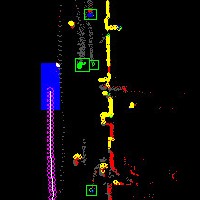
We are developing the algorithms to solve Simultaneous Localization and Mapping (SLAM) and Detection, Tracking and Classification of Moving Objects (DTCMO) problems for both indoor and outdoor applications.
Displaying 10 Publications
current head
