Although Shape-From-Silhouette (SFS) is a popular 3D reconstruction method, the shape estimated using SFS can be coarse if there are only a few cameras. Better shape estimates or Visual Hulls can be obtained if the number of distinct silhouette images is increased. Instead of increasing the number of physical cameras (the across space approach), in this project multiple silhouette images captured across time are combined to compute a refined Visual Hull. The Temporal Shape-From-Silhouette Algorithm consists of two tasks: Visual Hull Alignment and Visual Hull Refinement. Temporal SFS is first devised for rigid objects and then extended to articulated objects (with rigid parts).
Example Results (Rigid Case):
 |
 |
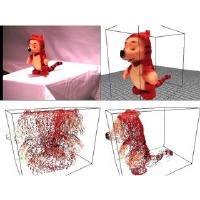
Example Results (Piecewise Rigid/Articulated Case):
 |
 |
current head

current staff

current contact
past head
- Simon Baker