Transit Bus Collision Warning Systems
Project Head:
This project is a joint research program sponsored by a partnership of California and Pennsylvania teams under the Department of Transportation Federal Transit Administration Intelligent Vehicle Initiative program. The goal is to shorten the commercialization cycle of collision warning systems for transit buses. California PATH and the CMU-RI Navlab group have each developed a collision warning system, PATH for frontal collisions and Navlab for side collisions.
By integrating both systems we want to accomplish following objectives:
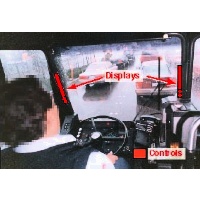
- Integrate the advanced side collision warning and frontal collision warning systems into a unified whole with one transit operator interface.
- Specify and build a usable Driver Vehicle Interface (DVI) prototype.
- Conduct limited operational testing and evaluation of enhanced commercial systems in transit use.
- Reduce the development risks and accelerate the deployment of CWS by Integrating marketing, manufacturing, and commercialization considerations into the CWS development process.
- Develop and test CWS leading toward commercialization.
Displaying 14 Publications
2007
Journal Article, International Journal of Robotics Research, Vol. 26, No. 9, pp. 889 - 916, September, 2007
2006
Miscellaneous, Carnegie Mellon University, FTA-PA-26-7006-06.1, May, 2006
2005
Conference Paper, Proceedings of 5th International Conference on ITS Telecommunications, pp. 73 - 78, June, 2005
Workshop Paper, 3rd Workshop Fahrerassistenzsysteme, pp. 56 - 63, April, 2005
2004
Miscellaneous, Carnegie Mellon University, FTA-PA-26-7006-04.1, December, 2004
Conference Paper, Proceedings of IEEE Intelligent Transportation Systems Conference (ITSC '04), pp. 343 - 348, October, 2004
Conference Paper, Proceedings of (IROS) IEEE/RSJ International Conference on Intelligent Robots and Systems, Vol. 1, pp. 412 - 418, September, 2004
Conference Paper, Proceedings of ITS America's 14th Annual Meeting and Exposition, April, 2004
PhD Thesis, Tech. Report, CMU-RI-TR-04-23, Robotics Institute, Carnegie Mellon University, April, 2004
2003
Journal Article, Mechatronics, Vol. 13, No. 10, pp. 1149 - 1161, December, 2003
current head





current contact
past staff
- David Duggins