In January 2004, NASA established a long-term program to extend human presence across the solar system, a primary goal of which will be to establish a human presence on the moon no later than 2020, as a precursor to human exploration of Mars. A central concept of this vision is that future space exploration activities must rely on human and robotic capabilities combined in order to achieve a long-term and well-orchestrated campaign of space exploration. Thus, in order to meet these technological challenges, systems which support safe human supervision of fleets of task-oriented robots will be a necessity for future space exploration endeavors.
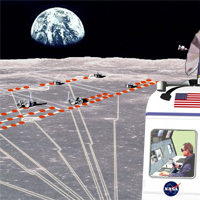
Our specific aim is to develop a general and widely applicable architecture for human supervision of a fleet of autonomous robots in support of sustained, affordable, and safe space exploration. We will demonstrate the benefits of this system-of-systems in the particular real-world task of wide-area mineral prospecting.
Together with NASA’s Jet Propulsion Laboratory and the NASA Ames Research Center we will develop a software architecture and system for autonomous cooperative perception, control, coordination, navigation, and information-sharing / management of multiple robots: the Robot Supervision Architecture (RSA).
The RSA comprises three subsystems:
- the Autonomous Navigation System (ANS), which controls the individual robots of the prospecting fleet and their cooperation
- the Hazard and Assistance Detection (HAD) system, which provides rover-based hazard/failure detection and identification, and guides autonomous and/or teleoperated recovery, and
- the Telepresence and Teleoperation System (TTS), which provides an immersive information, communication, and control interface to the human operator.
In addition to the RSA, there are two additional subsystems:
- the Networked Communications System (NCS), which carries high-bandwidth stereoscopic video, robot telemetry, and messages from the Autonomous Navigation System and the Hazard and Assistance Detection software to the teleoperation base and low-bandwidth signals from the teleoperation base for command and control, and
- the Prospecting Task Support (PTS), which is the autonomous, with assistance from a human counterpart when needed, search of an area for in situ resources that may be present on the Moon and/or Mars.
A fleet of robots such as this is not limited to prospecting; it is also directly applicable to other tasks in other realms such as space assembly, inspection, and maintenance; and planetary prospecting, mining, and construction.




past head
- John M Dolan
past staff
- Jeffrey J Baker
- Marcel Bergerman
- Ronald Conescu
- Alberto Elfes
- Ehud Halberstam
- Kian Hsiang Low
- Gregg Podnar
- Yaron Rachlin
past contact
- Gregg Podnar