Dynamically-Stable Mobile Robots in Human Environments
Our research goal is to gain a deeper understanding of how such dynamic agility can be achieved in mobile machines interacting with people and operating in normal home and workplace environments. We are developing novel dynamically-stable rolling machine and walking machine research platforms to study this issue. We will evaluate the efficacy of this type of dynamic locomotion in the context of human environments.
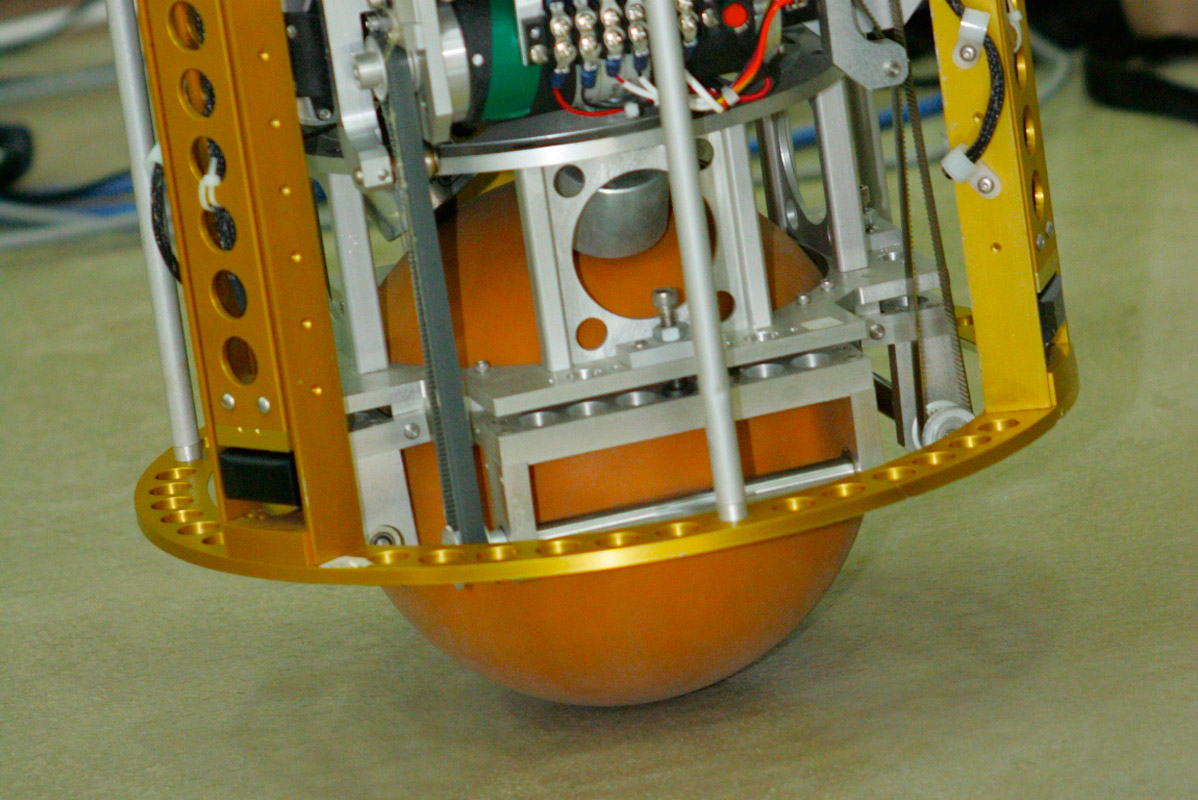
Close-up of Ballbot’s single spherical wheel.